התקנת אביזרים והשימוש בהם: המלצות חשובות <?xml version="1.0" standalone="yes"?>warningאביזרי חשמל ואלקטרוניקהלפני התקנת אביזר מסוג זה (במיוחד עבור משדרים/מקלטים: רוחב פס תדר, רמת ההספק, מיקום האנטנה ועוד), ודא שהוא תואם לרכב שלך. יש ליצור קשר עם מוסך מורשה.לפני חיבור אביזר כלשהו לשקע, יש לוודא שרמת המתח שלו אינה חורגת מרמת המתח המסופקת על ידי השקעשקע לאביזריםציוד מולטימדיה. סכנת שריפה. פפֶּרֶק
נתיכים <?xml version="1.0" standalone="yes"?>תיבות נתיכים אם רכיב חשמלי כלשהו אינו פועל, בדוק את מצב הנתיכים.נתיכים בתא הנוסעים Aיש להניח את היד במיקום 2 ולמשוך כדי לפתוח את הלשונית 1.(בהתאם לדגם הרכב) פפֶּרֶק
להבי מגבים: החלפה <?xml version="1.0" standalone="yes"?>החלפת להבי המגבים 2 כדי להחליף את המגבים, יש להעביר אותם תחילה למצב שירות B.כשההצתה פועלת והמנוע אינו פועל: פפֶּרֶק
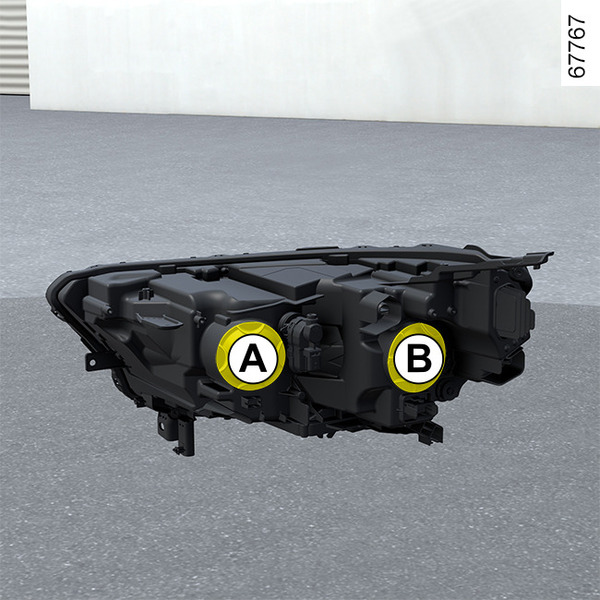
תאורה חיצונית: החלפת נורות <?xml version="1.0" standalone="yes"?>פנסים קדמיים: החלפת נורותכלי רכב שבהם מותקנים פנסים קדמיים בטכנולוגיית הלוגן אור נסיעה נמוךיש להסיר את הכיסוי A. פפֶּרֶק
סוללה: התאוששות לאחר תקלה <?xml version="1.0" standalone="yes"?>כדי למנוע כל סיכון של ניצוצות:יש לוודא שאביזרים צורכי חשמל (תאורה בתא הנוסעים וכו') כבויים לפני ניתוק או חיבור מחדש של הסוללה;בעת ביצוע טעינה, יש להפסיק את פעולת המטען לפני חיבור או ניתוק הסוללה;אין להניח חפצים מתכתיים על הסוללה מכיוון שהדבר עלול לגרום לקצר חשמלי בין הדקי החיבור;יש להמתין לפחות חמש דקות לאחר כיבוי המנוע לפני ניתוק הסוללה;ודא שאתה מחבר מחדש את מסופי הסוללה לאחר ההתקנה מחדש. פפֶּרֶק
גרירה: התאוששות מתקלה <?xml version="1.0" standalone="yes"?>לפני ביצוע גרירה, יש להעביר את בורר ההילוכים להילוך סרק (מצב N בכלי רכב שבהם מותקנת תיבת הילוכים אוטומטית), לשחרר את נעילת מוט גלגל ההגה ואת בלם החניה.ביטול הנעילה של עמוד ההגה פפֶּרֶק