ワイパーブレード: 交換 <?xml version="1.0" standalone="yes"?>ウインドウワイパーブレード 2 の交換 ワイパを交換するには、まずサービス位置Bに入れます。イグニッションスイッチ ON 、エンジンオフ; 章
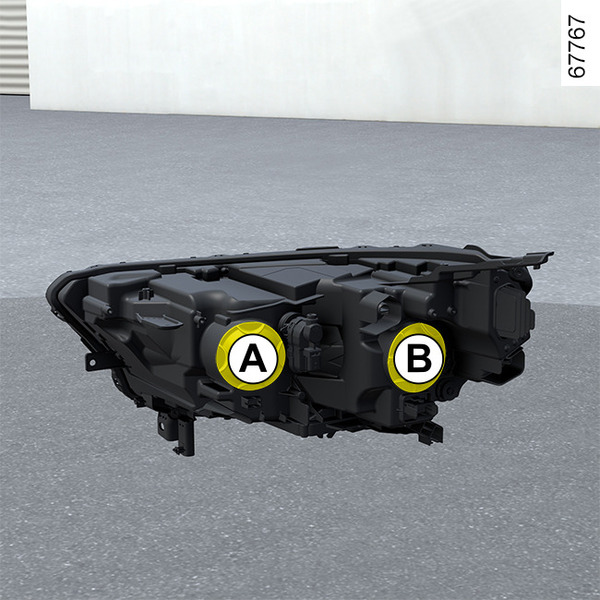
エクステリアランプ: 電球の交換 <?xml version="1.0" standalone="yes"?>ヘッドランプ: バルブ交換ハロゲンヘッドランプ装備車 ロービームカバー A を取り外します。バルブホルダー 1 を動かしてクリップを外し、バルブを交換します。 章
バッテリ: 故障時の対処 <?xml version="1.0" standalone="yes"?>バッテリーを取扱うときの注意バッテリーを切り離すか再接続する場合は、その前に「電装品」(車内灯など)のスイッチを OFF にしてください。充電の際には、充電器のスイッチを OFF にしてからバッテリとの接続または切り離しを行ってください。端子間での短絡の原因となり得るため、バッテリーの上には金属製のものを置かないでください。バッテリの切り離しは、エンジンのスイッチを OFF にしてから 5 分以上待った後に行います。バッテリーを取り付けた後は、ター ミナルが正しく接続されていること を確認します。 章
牽引: 車両故障時の対処 <?xml version="1.0" standalone="yes"?>けん引を行う前に、シフトレバーをニュートラル(オートマチックトランスミッション車ではNポジション)に入れ、ステアリングコラムのロックを解除してから、パーキングブレーキを解除します。ステアリングコラムのロック解除キーをイグニッションスイッチに挿入し、「オン」位置「ON」2にします(車種によっては、カードを車内に置いてエンジン始動ボタンを約2秒間押します)。 章
ホイールトリム、ホイールトリム - ホイール <?xml version="1.0" standalone="yes"?>ホイールトリム(ホイールボルトが見えないタイプ) ホイールキャップを外すには、ホイールキャップ用フック1(ツールキット内に収納されている)を使用します。フックをバルブ2の近くの開口部 に引っかけて外します。 章
タイヤの交換 <?xml version="1.0" standalone="yes"?> warningハザードランプを点灯してください。交通から離れた、水平で滑らない硬い地面の上に車を停めます。 章
パンク、スペアタイヤ <?xml version="1.0" standalone="yes"?>パンクした場合車両によっては、スペアタイヤまたはタイヤ空気注入キットが装備されています タイヤ空気注入キット。tipタイヤ空気圧モニターシス テム装備車 章